はじめに
私たちの日常生活を直接支援することを目的とするサービスロボットは,生活分野,介護福祉分野,医療分野,移動分野などで利用される.サービスロボットが対象とする課題は,高齢者や障がい者の生活支援・社会参加の実現などが挙げられており,具体的には身体機能の補助や,商業施設などにおける案内支援・情報提供,家庭での生活支援,コミュニティ形成支援,介護者の負担軽減などが挙げられている.
ロボットサービスの実現に向けた技術的課題は,個々のサービス内容以上に,私たちが生活する環境の中にロボットを導入することそのものに関することが大きい.産業用ロボットのために注意深く設計された工場の環境とは異なり,私たちの生活する環境の多くは人のために設計されており,場所によって様々に変化する.また,その中で出会う人々に対してサービスを提供するためには,ロボットと人のあいだの対話技術 (Human-Robot Interaction, HRI) が必要となる.安全性についても,産業用ロボットとは異なった基準が求められる.2014年に発行されたISO 13482ではサービスロボットの安全要求事項が規定されている.
ロボット,およびロボットを利用したサービスのシステム化においては,開発した要素技術を広く再利用できることが望ましい.そのため,ハードウェアおよびソフトウェアの両面からモジュール化が進展しており,それらを組み合わせることで,ロボットやロボットサービスが実現されつつある.分散システムの設計と実装をターゲットとした民間標準化団体であるObject Management Group (OMG) では,2004年よりロボット技術のための標準化に取り組み,2006年よりロボット技術のための技術部会Robotics Domain Task Force (Robotics DTF) を設立し,Robotic Technology Component (RTC) およびRobotic Interaction Service (RoIS) などの仕様を発行している(後述).ISOでは,TC 299 (Robotics) / WG6 (Modularity for Service Robots) においてハードウェアとソフトウェアの両面からモジュール化のための仕様策定が進められている.研究分野を中心に使われてきたRobot Operating System (ROS) もデファクト標準としての地位を確立している.
これらの仕様より,ロボットサービスの実現に向けて,ロボットの機能をモジュール化したコンポーネント/モジュールの相互接続および再利用のためのインタフェース仕様設計の課題は解決されつつある.しかしながら,それらのコンポーネントがどのような機能を提供し,どのような環境で利用可能であり,外界にどのような影響を与えるのかについて記述する方法は,現時点では明確に定められておらず,ロボットサービスまたはコンポーネントの設計者が自然言語で記述するにとどまっている.そのためロボットサービスを構成するにあたって,コンポーネント/モジュール間の通信の接続性は保証できても,その利用にあたっての効果や安全性を形式的に検証する手段は整備されていない.さまざまな環境下で多様なロボットサービスを提供するためには,多種のロボットの機能(コンポーネント)を動的に連携させる必要がある.そのためにはサービスの動的な構成にあたって,関与するコンポーネントの効果や安全性を検証する手段が必要となる.
この問題は,さまざまな分野に共通する課題として認識されており,OMGにおいても複数の技術分野でオントロジー1の定義が進められている.それらを支えるオントロジープラットフォームの仕様も策定されている.ロボット分野においても,IEEE Robotics and Automation Society (RAS) では2015年にCore Ontology for Robotics and Automation (CORA) を発行し,その上に複数の分野別のオントロジーの策定を進めている.本稿で紹介する OMG Robotic Service Ontology (RoSO) は,特にロボットサービスに向けたオントロジーを策定するために立ち上げられた.以下,本稿では OMG におけるこれまでのロボット関連技術の標準化活動の動向と,ロボットサービスの実装事例,RoSOの目指すロボットサービスのためのオントロジーの目標と今後のスケジュールについて紹介する.
OMGにおけるロボット技術の標準化
OMG Robotics DTF
OMGの技術部会は,そのターゲットに応じて大きく二つに分けられる.一つは,さまざまな分野で共通に利用され得る技術をターゲットとするPlatform Technical Committee (PTC) に属するPlatform Task Force (PTF) であり,もう一つは,特定の技術分野をターゲットとするDomain Technical Committee (DTC) に属するDomain Task Force (DTF) である.
現在,ロボット技術に関する標準化は,2006年に設立されたRobotics DTFで議論されている.Robotics DTFが担当した仕様としては,制定順に,Robotic Technology Component (RTC),Robotic Localization Service (RLS),Robotic Interaction Service (RoIS) およびFinite State Machine Component for RTC (FSM4RTC) がある.
コンポーネント技術の標準化
コンポーネント機能の標準化は,Robotics DTF内のInfrastructure Working Groupにて進められてきた.
RTCは,分散コンポーネント技術2を基盤に,ロボット技術分野でのコンポーネントで共通して必要となる機能を定義したミドルウェア仕様であり,当初はOMG Middleware and Related Services (MARS) PTFで議論され,2008年にRTC 1.0として発行された.現在は,2012年に改定されたRTC 1.1が最新である (OMG 2012a).日本国内からの提案は,産業技術総合研究所 (産総研,AIST) を中心に進められた.産総研が開発・配布している RT ミドルウェア (OpenRTM-aist) の仕様は,このRTCに基づくものである.RTC仕様に基づいた実装は,OpenRTM-aist以外にも提供され,相互接続性が確認されている.
FSM4RTCはRTCを拡張する仕様で,RTCを用いて実装を進める上で共通に利用される機能としての有限状態機械をコンポーネントとして仕様を定めたものであり,産総研の協力を受けて本田技研工業よりOMGに提出され,2016年にFSM4RTC 1.0が発行された (OMG 2016).
ロボット機能サービスの標準化
RLSおよびRoISは,ロボットが必要とする機能を定義するために策定された仕様である.上位のサービス関連機能については,同DTF内のRobotic Functional Service Working Group内で進められてきた.
RLSは,位置情報の表現形式やインタフェースを特定のデバイスやアルゴリズムとは独立した汎用的な形で規定するもので,2010年にRLS 1.0が発行された.その後,姿勢情報の記述方法の追加,座標系記述の汎用化など,追加・修正した改訂仕様が,2012年にRLS 1.1として発行されている (OMG 2012b).
RoISは,サービスアプリケーションからHRI機能(人検出,個人同定,音声認識など,様々なロボットが持つ機能)を使うためのインタフェースを共通化するための枠組みを規定する.この枠組みを使うことで,同じサービスアプリケーションが,異なるロボットでも動作できるようにする.2013年にRoIS 1.0が発行され,現在の最新仕様は2018年に改定されたRoIS 1.2である (OMG 2018).
RLSおよびRoSOの仕様は,日本ロボット工業会 (Japan Robot Association, JARA) と韓国電子通信研究院 (Electronics and Telecommunications Research Institute, ETRI) より OMG に提出された3.また実装事例は,ETRIと国際電気通信基礎技術研究所(ATR)より提案されている.
ロボットサービスの実装事例
ATRの実装事例は,ロボットと携帯電話,センサネットワークなどが互いに機能を補完して,単一のロボットではできない機能やサービスを実現することを狙ったネットワークロボット技術の研究開発として総務省の委託を受けて実施されたものである (萩田 2012, Kamei et al. 2012).この実装事例は,複数の拠点において,複数のロボットが,複数のユーザに対して,時間を越えて連携したサービスを提供するための共通の技術基盤として,ユビキタスネットワークロボット・プラットフォーム (UNR Platform, UNRプラットフォーム) として公開されている.また同成果からは全体アーキテクチャに関するITU-T Y.4106 (ITU-T 2013) をはじめとする複数の標準仕様が提案されている (亀井 2016).
具体的なサービス事例としては,特に高齢者の社会参加支援を対象として,ショッピングモールにおける案内や買い物支援サービスが実装された.利用者の特性に応じて異なってくる支援内容を,複数種類のロボットの連携により実現した.店舗内を案内する場合でも,同行して商品を案内するロボットによりコミュニケーション指向のサービスを提供する場合や,車椅子型の移動支援ロボットによりサービスを提供する場合が考えられる.これらの差異に対応するために,自宅・移動手段・店舗という異なる場で提供される複数種類のサービスの間で情報を共有するとともに,サービスの提供に用いるロボットの動的な割り当てを行った.
ロボットサービスのためのオントロジーの標準化
OMG RoSOの概要
サービスロボットは,人間が活動している環境で,人間に対してサービスを提供するロボットである.ここでサービスとは,物理的なインタラクションを含むサービスと,人に対して対話的に情報を提供するサービスのどちらも含み,主に人とのインタラクションに基づき,人の活動をサポートするように設計されたものを指す.サービスロボットは通常,工業目的ではなく,生活者向けに設計されており,環境が統制されておらず予測の困難な生活環境において,目的として与えられたサービスを提供するために,半自律的,または完全に自律的に意思決定と行動を行う.そのためには,ロボットとサービス環境を構成するセンサやアクチュエータなどのコンポーネントと環境内の他のさまざまな要素との間の多様なインタラクションを対象として,個々の要素が動作するために必要な条件や,動作の結果が他の要素にどのような影響を及ぼすかなどを記述するための形式的な枠組みが必要となる.
2018年にOMGでの活動が立ち上げられたRoSO (Robotic Service Ontology) は,そのための枠組みとして,ロボットサービスのためのオントロジーを定義するものであり,先行するRoIS仕様のコンポーネント機能の記述に形式的な枠組みを与え,また今後の拡張のための基盤を提供しようとするものである.
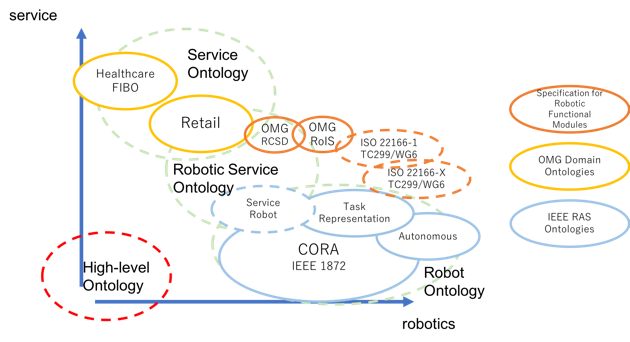
RoSOの標準化活動は2018年12月にOMGより発行されたRoSO RFP (request for proposal) 文書に基づいて進められている (OMG Robotics DTF 2018).RoSOが対象とする領域と他の標準との関係を図1に示す。
ロボット分野でのオントロジーに関しては,IEEE RASより発行されたIEEE 1872-2015 (CORA; Core Ontology for Robotics and Automation) が,ロボット技術の基盤となる語彙の定義を与えている.IEEE RASでは,CORAを基盤として自律ロボットや協働ロボットなどの複数のドメインを対象として,上位のオントロジーの定義に取り組んでいる.他方OMGでは,さまざまなサービス分野でオントロジーの定義に取り組んでおり,ロボット対話サービスやリテールサービスにおけるオントロジーの定義が,ロボット技術と特に関連が強い.RoSOが対象とする領域は,これらの結節点に位置付けられる.そのため,OMG内の別分野のタスクフォースや,IEEE RASやISO TC299/WG6などの他の標準化団体との意見交換を継続的しながら仕様策定が進められる予定である.
RoSO制定までのスケジュール
OMGでのRoSOの標準化活動は,2018年12月のRoSO RFP (request for proposal) 文書の発行により,公式に開始された.開始時点より日本,韓国,フランスから積極的な提案が行われており,初期ドラフト作成に向けて議論を重ねるべき状況であるが,コロナ禍における昨今の状況により国際的な連携が滞るとともに,各国での研究プロジェクトの再構築が行われており,状況に応じてスケジュールを見直しながら進めている.
2020年9月の時点でのスケジュールを表1に示す.初期ドラフト投稿への各組織からの参加表明 (Letter of Interest, LOI) と初期ドラフトの提出を2021年5月に設定している.この期限は,2021年3月のOMG会議にて11月まで延長される予定である.各組織から提出された複数の初期ドラフト文書に基づき,その後6ヶ月間の議論期間をもって統合した修正ドラフト文書をOMGに対して提出する(現行で2021年12月だが,2022年5月まで延長予定).OMG技術委員会での承認を経て,RoSO 1.0のベータ版の仕様書として公開して広く意見を求め,同時に設立するRoSO FTF (Finalization Task Force) において,14ヶ月の最終仕様作成プロセスを開始する.
前述のとおりRoSOは,RoISなどの関連仕様の今後の拡張のための基盤を与えるものであるから,RoSO 1.0ベータ版の仕様書の公開後ただちにRoSO FTFでの活動と並行してRoISの改定が予定されている.
| 日付 | 使用する書式 |
| 2021/5/10 | LOI (Letter of Interest) submission |
| 2021/5/17 | Initial draft submission |
| 2021/6/7 | Initial draft presentation |
| 2021/6/7 | Voter registration |
| 2021/11/8 | Revised draft submission |
| 2021/12/6 | Revised draft presentation |
表1 RoSO time table(OMG robotics/20-09-08)
おわりに
本稿では,OMGにおけるこれまでのロボット関連技術の標準化活動の動向と,ロボットサービスに関連するオントロジーを策定するために立ち上げたRoSOの目標と今後のスケジュールについて紹介した.
これまでのロボットサービスに関連する様々なデファクトおよびデジュール標準の流れから,ロボットサービスのオントロジーを定義する流れは必然的であり,この先には,ロボットサービス開発に関するモジュール化,再利用性の向上に伴う開発の簡易化が期待出来る.これらの活動が,コロナ禍において益々期待されているロボットサービス市場の創出に貢献することを祈っている.
参考文献
ITU-T (2013). Requirements and functional model for a ubiquitous network robot platform that supports ubiquitous sensor network applications and services, ITU-T recommendation Y.4106.
Kamei et al. (2012). Cloud Network Robotics, IEEE Network Magazine, 26(3), 28-34.
OMG (2012a). Robotic Technology Component (RTC), version 1.1 (formal/2012-09-01).
OMG (2012b). Robotic Localization Service (RLS), version 1.1 (formal/2012-08-01).
OMG (2016). Finite State Machine Component for RTC (FSM4RTC), version 1.0 (formal/2016-04-01).
OMG (2018). Robotic Interaction Service (RoIS) Frame-work, version 1.2 (formal/2018-05-04).
OMG Robotics DTF (2018). Robotic Service Ontology (RoSO) Request for Proposal, (robotics/2018-12-08).
亀井剛次 (2015). ネットワークロボットを支えるプラットフォーム, ITUジャーナル, 45(.9), 10-13.
萩田紀博 (2012). クラウドネットワークロボット関連技術の動向, 電子情報通信学会誌 95(12), 1052-1056.
著者紹介
亀井 剛次
NTTコミュニケーション科学基礎研究所協創情報研究部主任研究員.2019年より現職.2018年よりOMG Robotics DTF 共同議長. ATR知能ロボティクス研究所在籍時より OMGにてRoISおよび RoSOの策定に従事.
宮下 敬宏
ATR インタラクション科学研究所長,同インタラクション技術バンク長.2019年より現職.ネットワークロボット技術,サイバネティックアバター技術,およびロボットサービスの研究開発・社会実装に従事.
脚注
- ある分野の事物やその関係を知識として形式的に記述するための枠組み,および具体的に定義された語彙の集合.ここでは特に計算により検証するために(検証可能なように)定義された知識を指す.
- 複数のコンピュータ上で動作するソフトウェア部品が通信を介して協調して動作できるようにする技術.
- 産総研および国際電気通信基礎技術研究所 (ATR) をはじめとする11団体が策定に関わった組織として挙げられている.







