はじめに
スマートシティ (国土交通省 2018)においては,街や社会の様々な課題をAIやシミュレーションといった高度なデジタル技術に基づいて解決することが期待されている.そのためには,人やモノ,情報の動きといった,街における活動をどのようにデジタル化してデジタル空間上で再現するか? またその空間上でどのように課題を解決していくか? さらに,その解決手法をどう実社会に提供していくか? といった一連の取り組みを統合的に支援することが極めて重要である.
このためには,環境からデータを取得するためのIoTやセンサーネット,データを管理・解析して問題解決の方法を得るためのデータ管理・解析基盤,得た解決手法をサービスとして提供するためのツール,ロボットや自律移動体の制御ソフト等からなる,IT基盤(プラットフォーム)が重要である.
さて、このプラットフォームの実現にあたっては,人やモノは必ず実空間における位置を持つため,街という三次元空間をそのままデジタル化し,その上で位置をベースに人やモノの活動に伴う多様なデータを連携・統合することが有益である.
特に,街における人やモノの「移動」は,位置の変化として三次元的に扱うことが重要であるし,街の状況は変化するものであるため,街や社会のデジタル化については時空間(三次元+時間)情報を基盤的に扱うことが不可欠である.
そこで本稿では,スマートシティにおいて重要な要素である「移動」を支援するための時空間プラットフォームについて,主に著者らが取り組んでいるNEDOプロジェクト「安全・安心の移動のための三次元マップ等の構築」の紹介を中心として述べる.
スマートシティと時空間情報
スマートシティについては,国土交通省都市計画局の「スマートシティの実現に向けて 中間とりまとめ」 (国土交通省 2018)では,『都市の抱える諸課題に対して,ICT等の新技術を活用しつつ,マネジメント(計画,整備,管理・運営等)が行われ,全体最適化が図られる持続可能な都市または地区』と定められている.現在,国交省が選定した先行モデルプロジェクト事業(柏の葉(三井不動産 2020),つくば,大丸有(大手町・丸の内・有楽町の3つを合わせた地区)等の15地域の事業) (国土交通省 2019)を中心として,地域の事情に応じたモビリティ,ヘルスケア,エネルギー,防災といった課題領域に取り組みつつある.また,投資余力が大きい大都市のみならず会津若松(海老原,中村 2019)のような地域においても先進的な試みがなされており,都市~地方の様々な事情に応じた,様々な形でのスマートシティ活動が進められている.
Society5.0 参照モデルと都市OS
これらスマートシティの実現においては,上記課題に対する最適化の手法が様々な形でのスマートなサービスとして提供されることを想定しているが,この実現の過程では,法規制等のルールの問題や街のセンシングに対する社会的受容性の問題から,情報システムの問題に至る,様々な側面を扱う必要がある.そこで,Society5.0(内閣府 2020a)に基づくスマートシティ(内閣府 2020b)においては,図1のような参照モデル(内閣府 2020b)を定義して,街の活動データのセンシングから政策立案に至る一連の機能をレイヤ(層)化している.
特徴としては,ITによるサービス提供だけでなく,戦略・政策~ルール~組織~ビジネスといった,街を支えるサービス群の上位にあたる機能が街の活動を効果的に実現するために重要な機能として上位層に位置付けている点である.先行しているスマートシティプロジェクト群においても,これらを遂行するエリアマネジメント組織が設立されており,活動の成否を握る重要な役割を担っている.
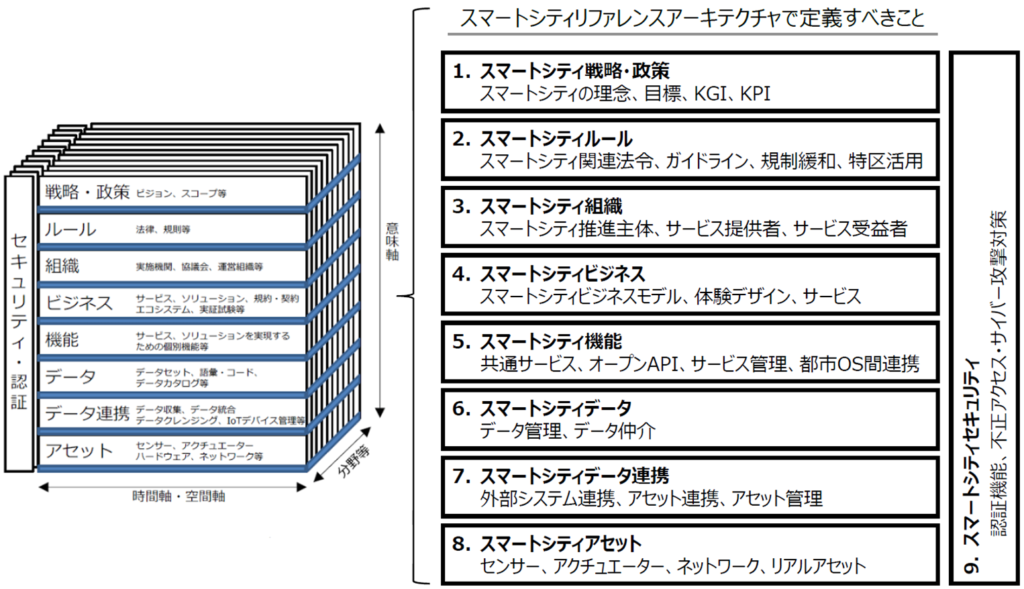
一方,サービスを支えるIT基盤としては,参照モデルの下位階層として以下のような機能が必要であり,これらを有するIT基盤を都市OS(内閣府2020c)と呼ぶ.
- 都市を多面的にセンシングし,データを収集する機能
- 収集データから都市の課題~解決法をシミュレーション・解析により策定する機能
- サービス提供による介入や,ロボットによる移動等,実社会に影響を及ぼす機能
- 上記機能を利活用するための機能(データやサービスのカタログ等)
これらの機能が都市ごとに別々の形で実現されるとサイロ化されて地域の壁を越えた広域にわたる問題解決ができず,またアプリケーションの生産性が高まらないため,このような機能はOSとして互換性・相互接続性の高い形で提供される必要がある.
都市OSの課題と時空間情報
都市OSの仕様については,(内閣府 2020c)により概要が定められている.特にサービス(API)連携を実現するための相互認証・認可の機能については,実装可能な仕様が定義(OpenID Connect(openid.net/connect))されており,基本的なサービス連携については担保されている.
しかし,現在の都市OSの仕様は全体としては抽象度が高く,すべての層で実装可能な仕様として定義されているわけではない.例えば,データ連携層,データ層におけるデータアクセスやその連携・統合機能は実装可能な仕様までは定義されておらず,プロダクト依存性がある.アセット層(センシング)についても同様である.
さらに,参照モデルの各層はシステムの抽象化関係に必ずしも基づいていない.例えばネットワークの参照モデル(ISO 1994)においては,上位層は下位層の機能を抽象化し,相互に参照・非参照関係にあるが,都市OSにおいてはその関係が十分成立していない.例えば,データ層の機能とデータ連携層は抽象度の異なる関係にないため,実装仕様が重複する可能性があり,各層における相互接続性の実現が困難である.
従って,実際の都市OS実現にあたっては,実装におけるすり合わせ(仕様の具体化)と参照モデルの整理(機能間の抽象化の整理)の両方が必要であるが,このための方向性が十分定まっていない点は,今後の課題であると考えている.
この状況に対して,改めて街の活動をデジタル空間で把握する,という視点から考えるとき,多くのデータはリアル空間,つまり「位置・場所」に関連している.
また,サービスによる介入方法についても,位置・場所に極めて関連が深いことから,位置・場所を扱う時空間(三次元+時間)情報を介したデータ連携・統合は直感的かつ有効であると考えられる.
時空間情報は従来から地理情報,地図情報として実装や仕様の標準化の進んでいる(OGC 2020)分野であるため,都市OSで重要なセンシング(取得)~データ連携・統合を,
- 位置・場所に基づき時空間上で連携・統合する.
- 取得~連携・統合にかかる詳細仕様のうち,時空間的な情報の処理・管理について,地理空間に関わる標準に基づいて行う.
という方法が,実際的な相互連携・統合を実現するために有効なアプローチと考えられる.
特に,モビリティや物流,人の流れといったリアル空間での「移動」を扱う応用については,時空間情報の扱いが不可欠であり,これを扱うことのできるプラットフォーム(時空間情報プラットフォーム)を都市OS実現の核としていくことは重要と考えられる.
時空間情報プラットフォームと「移動」支援に関わる問題
さて,三次元情報,時空間情報に関しては,自動運転を代表として建機等のi-Construction,物流倉庫等の特定空間でのロボット応用等,多くの移動応用が知られている.またその情報基盤,サービス基盤についても様々なソフトウェア,サービス等が検討されている(COCN 2015).
このような既存の三次元地図に関わる活動に対して「移動」「スマートシティ」の視点からは、次のような問題が考えられる.
- End-to-Endのシームレスな移動の支援が難しい:例えば自動運転地図は公道が中心であり,歩道や私有地等の整備は十分でない.点群データは地物や場所の意味が扱えないため,「場所」を扱うには別の情報と統合する必要がある.建築で使われているBIM/CIMモデルは建物外を十分扱えず,データフォーマットも異なる.このように,応用によりデータ形式や表現のレベルが異なるため,例えば屋内~屋外~屋内,といったEnd-to-Endの移動を支援するには,異種のデータを統合的に管理してシームレスな三次元地図を構築する必要がある.
- 空間と移動体を十分統合管理できていない:三次元地図において,単に建物や道路,地物といった静的情報だけでなく,人の動き,車の動き,ロボットの動きといった様々な移動を空間上で統一的に扱う必要があるが,データフォーマット等が異なるため,基盤上での統合が十分できていない.
- 維持更新の仕組みが十分でない:三次元地図は構築に手間がかかるが,維持管理を行わないと陳腐化してしまう.時間に伴う移動の変化も含め,地図の変化を捉える維持管理・更新管理の仕組みを構築する必要がある.
- 応用が個別化・サイロ化しがちで,街の複合的な価値提供構造を効果的に支援できない:三次元地図に基づく価値提供は,単純に移動サービス,見守りサービス,といった形で個別に提供されるのではなく,自動配送のついでに見守る,自律移動のついでに地図の差分を検出する,といった複合的な構造を支援する必要がある.現在の応用や基盤はこのような構造を十分支援できていないので,応用構築や地図維持管理のコストが高い.
プロジェクト紹介
これらの問題に対して,産業技術総合研究所(以下,産総研)を中心としたNEDOプロジェクト「安全・安心の移動のための三次元マップ等の構築」(NEDO 2020)では,以下のアプローチに基づいたプラットフォームやサービスの研究開発を実証的に行っている(金,的野,中村 2019)(佐々木,新島2020).
アプローチ
本プロジェクトでは,3.(1)~(4)の各問題に対し、下記(1)~(4)のような考え方に基づいて取り組んでいる.
- 地理空間国際標準に基づく,屋内~屋外にわたるシームレスな異種データ統合管理環境の実現:OGC(Open Geospatial Consortium)(OGC 2020)を中心とした地理空間標準に基づいた時空間情報(三次元地図+時間)のデータアクセス・管理・可視化環境の提供により,異種のデータ連携・統合を容易にしてシームレスな環境を実現する.点群アクセス等の規格が存在しない機能については,OGCの仕様の考え方に基づいて策定・実装する.
- 地図と移動体を統合管理:時空間情報だけでなく,産総研等がOGCで策定した移動体表現の規格であるMoving Features(OGC 2019)に基づき,移動体をも統合的に管理する.また,可視化についてもOGC 3DTiles(OGC 2018)で統合的に扱う.
- 精度管理の考え方に基づいて,低コストで時空間情報を追加・更新・統合する方法を開発する.
- 実データやサービスを踏まえた環境提供により複合的なサービスを実現する.また,自律移動中のセンシングに基づいた地図更新や,混雑状況認識等,複合的なサービス実現のための機能を実現する.これらを柏の葉や台場等,実地域のデータと併せて提供し,街の新たな応用の創出を図る.
プラットフォームの構成と主な機能
プロジェクトで研究開発する時空間情報プラットフォーム及び応用の概要構成を図2に示す.機能としては下記(1)~(3)の層よりなる.
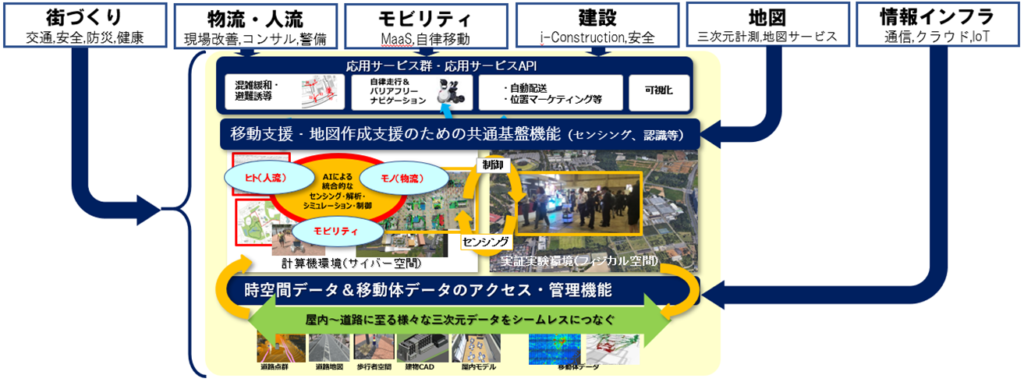
- 時空間データ・移動体データのアクセス・管理機能:異種のデータ表現を統一的なアクセスAPIで操作するために、PntML-3Dmap / MF (Moving Features)(金,的野,中村2019)と呼ばれる規格を定義している.このうち移動体情報については既定義のMoving Featuresデータ表現に基づき,そのAPIを定義,支援する.対象とするデータフォーマットは,各種3Dデータ(点群,OBJ, CityGML),移動体データ(Moving Features)及び可視化のための3DTilesである.
- 移動支援・地図作成支援のための共通機能:移動応用や地図作成を容易にするための共通機能であり,以下のような機能群からなる.
- リアルタイムセンシング:
- 人流測定,差分検知,測位等
- データ処理・認識・学習:
- シミュレーション,データ同化
- 地物認識,意味推定
- 経路導出
- 地図作成支援:
- 応用向け地図作成:異なる機種の移動体(ロボット)対応地図作成等
- 地図接合・変形:位置合わせ等
- 各種応用サービス:具体的な移動応用サービスであり,以下のようなものを整備しつつある.
- 混雑緩和・避難誘導
- 自律走行:自動運転車椅子やロボット等の自律移動
- 物流シミュレーション
- 可視化
なお,最近の状況に対応して,日本全国の移動体データを使ったコロナ感染シミュレーションも行っている(AI Japan R&D Network 2020).
利用可能なサービス・データ
柏の葉や台場等,産総研で取得した地域とオープンデータを中心とした3Dデータと併せ,研究開発中の時空間情報プラットフォームの一部を3DDB Viewerとして以下のURLで提供中である.述べた通り,可視化用に全てのデータを3DTiles形式に変換しているため,Webブラウザ上で異種データ表現のデータセットの統合的な可視化が可能となっている.
https://gsrt.airc.aist.go.jp/3ddb_demo/tdv/index.html
特に,センシングした移動体データと空間データを統合して,三次元空間で多数の物体が移動している状況を可視化することもできるため,三次元空間において「今何が起こっているか?」を表現・把握しやすく,街の活動の理解に対して有効である.
機能の有効性の実証実験事例
本プロジェクトは実証的な研究開発を行っているため,イベント等を利用した実証実験を多数行い,時空間情報プラットフォームの機能の有効性を検証している.
- PntMLの設計とプロトタイピング(金,的野,中村 2019):時空間情報を扱う規格としてのPntMLは,三次元地図アクセスのためのPntML-3Dmapと移動体アクセスのためのPntML-MF(Moving Features)からなる.Moving Featuresはアクセスの仕様が定まっているが,地図アクセスは定義されていないため,以下の機能を持つAPIを設計・実装している.

- 三次元情報の検索・登録:時間・空間範囲(緯度経度+高度)等に基づく空間情報の検索機能
- ジオメトリ処理:検索における重なりや包含関係の処理機能
- 同期・非同期処理:転送データが膨大な場合の非同期(ファイル書き出し等)処理機能
- データ変換操作:点群のVoxel化等,データ変変換に有用な機能
- 移動体のリアルタイムセンシングと予測 (新島他 2020):人の流れ等の移動物に対し,複数の種類のセンシング情報をプラットフォーム上で統合すると共に,これを長期間蓄積・学習することで,現在のセンシング状況に基づいた将来予測や,混雑状況を加味した経路シミュレーション等が可能になっている.
以下図5の例のように,異なる種類のセンサによる計測データ(RGB-Dセンサ及びLiDARセンサ)をROS(ros.org)に基づいて集約・送信できるように実現した.インターフェイスは(1)のPntML-MFに基づいているため,WebAPIから利活用することも可能である.

固定センサから得られる情報(白線)と自律移動ロボットに搭載したセンサの情報(同心円)をプラットフォーム上で統合すると共に,蓄積した移動体情報の機械学習結果に基づいた混雑予測(通路上の柱の色)を行う
- 自律移動と地図更新:自律移動では,周囲を三次元的にセンシングし,既存の三次元地図と位置合わせを行うことで自己位置を測定するが,この機能を使うとセンシングした三次元情報と既存の三次元地図との差分を検出することができる.これを地図の更新情報として活用することができる.

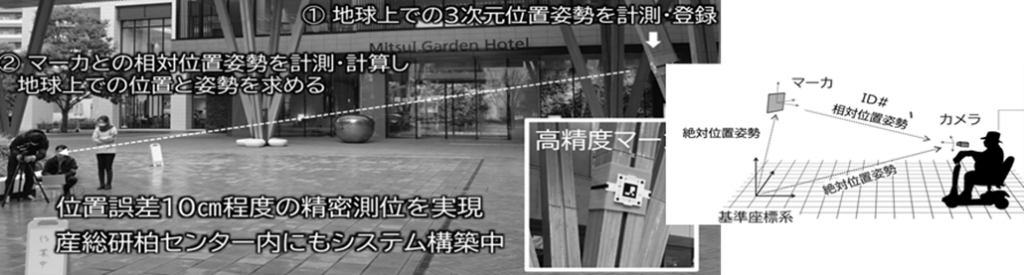
- マーカによる屋外精密測位(柏の葉IoTビジネス共創ラボ 2019):産総研開発の高精度マーカを街の主要なポイントに配置することで,マーカをカメラで撮影するだけで誤差の少ない測位を実現することができ,地下街等の分かりにくい場所でも位置と向きを正確に測位できる.
技術課題の取り組み事例
研究開発の過程でいくつかの技術課題についても取り組んでおり,以下事例のような成果を得ている.
- 可視・赤外同軸画像情報に基づいた認識技術 (Okazawa et al. 2019):可視光と赤外線との見え方が違うことを活用して,可視光カメラだけでは判別しにくいガラスや人を,それらが混在した環境で正確に認識する技術を研究開発した.これにより,環境内におけるガラス面の検出,夜間におけるガラス面への反射像とガラス越しの人物像の識別が可能になった.
- 大規模な空間情報の処理方法の改良(Kim et al. 2020):本プラットフォームでは時空間情報に対し,DGGS(Discrete Global Grid System)と呼ばれる空間参照方法を導入して点群データを検索管理する方法を実現しているが,高精度の三次元データを扱う場合は,中で用いるGeohashというハッシュ値が大きくなり性能の問題があったため,それを解決するEncoding / Decodingの方法を提案することで検索速度における4倍の性能向上を得た.
今後の課題
本プロジェクトは5年計画の3年目のため,本格研究として今後取り組むべき課題の内容と取り組みの方針について簡単に示す.
- 地図作成・維持管理のワークフロー確立:三次元地図は維持更新が課題である.精密な測定を繰り返すことは困難なため,スマホユーザの参画による地図更新や,移動サービス提供中の地図更新等,コストを下げる更新方法を確立する必要がある.この時,人手による部分も含めたワークフローと,多様な測定を統合することから発生する精度の管理手法を確立する.
- 意味の扱い:「~から~まで」といった移動を実現するには,場所や地物のラベルや意味が扱えなければならない.そのために点群やセンシングデータからの地物認識やオントロジを使った制御を実現する.CityGMLやPOI(Point Of Interest)といった抽象度の高いデータモデルに基づいたデータ操作を支援する.
- 応用の高度化と使える環境の実現:プラットフォームの高度化に並行して応用サービスの高度化を実現すると共に,地域のデータ整備や実証実験を続けて利用者の獲得・拡大を図る.
- 都市OSへの発展:時空間情報プラットフォームだけではスマートシティ全体の機能を支援することができないため,FIWARE(fiware.org)のような他のIoTプラットフォームやデータ統合ソリューション等との連携を進める必要があり,その過程で都市OSの層の整理も必要である.
本プロジェクトにおけるプラットフォームを,スマートシティの活動を支えるプラットフォームとして発展させるためには,実際の地域の活動に即したデータ連携や実証実験を行いながら構築していく必要がある.またその過程で,地域の課題解決や価値提供のためにどのようなデータを取得し,どうサービスに結び付けていくか,という参照モデルの上位層の役割が重要となるため,いくつかの地域や応用に基づいた活動としていく予定である.
次に,このようなプラットフォームの運用に際しては、公共空間の地図は国土の基盤情報として提供される可能性が高いが、私有地の情報等とも統合される必要があるし、サービスによっては最新の地図でなければならないため、更新の仕組みも併せて実現する必要もある.特に5.(1) で述べた通り、地図の更新は単独ではコストが高く事業として成立しにくいため、例えば自動配送中のセンシングによる地図更新やナビゲーション中の差分検知等、地図を活用するサービスと組み合わせた維持の仕組みの実現が不可欠である.
このため、プラットフォームの実現主体としては、地域において多様なサービスを提供するエリアマネジメント組織が地図を維持管理・提供することが想定される.多様・多数のサービスを組み合わせて維持管理の仕組みを設計・実現すれば更新コストが下がってくるため、全体としてのサービス設計(とビジネスモデルの設計)が重要と考えられる.
まとめ
スマートシティの活動で重要となる「移動」を支援するための時空間情報プラットフォームについて,プロジェクトの現状を紹介した.空間的なデータ統合を基本とすることで,可視化も含めた見通しの良い枠組みを与えることができ,街の活動の把握・理解の基盤として有益と考えている.引き続き研究開発と基盤,データ,応用の整備を並行して進めると共に,他地域との互換性を高めて実際的な相互互換性を高めていく計画である.
謝辞
本稿の成果はNEDOプロジェクト「安全・安心の移動のための三次元マップ等の構築」によるものであり,各サブテーマ担当者を中心としたプロジェクト参画メンバー全員に深謝する.なお,2020年度現在の参加組織は以下の通りである.
産業技術総合研究所
パナソニック株式会社
東京大学情報理工学系研究科
東京大学新領域創成科学研究科
東京大学空間情報科学研究センター
九州工業大学
ダイナミックマップ基盤株式会社
清水建設株式会社
三井不動産株式会社
参考文献
AI Japan R&D Network (2020).リアルな人の移動データを用いた日本全国の感染シミュレーション.
https://www.ai-japan.go.jp/603/627
COCN (2015).3次元位置情報を用いたサービスと共通基盤整備.
http://www.cocn.jp/report/thema69-L.pdf
ISO (1994). ISO/IEC 7498-1 Open Systems Interconnection - Basic Reference Model.
Kim, T., Lee, J., Kim, K-S., Matono, A., Li, K-J. (2020). Utilizing extended geocodes for handling massive three-dimensional point cloud data. World Wide Web. pp1-24.
NEDO (2020).人工知能技術適用によるスマート社会の実現 プロジェクト紹介.
https://www.nedo.go.jp/content/100906019.pdf
Okazawa, A., Takahata, T., Harada, T.(2019). Simultaneous transparent and non-transparent object segmentation with multispectral scenes. IEEE IROS(Intelligent Robots and Systems).pp4977-4984.
Open Geospatial Consortium (2018). 3D Tiles.
https://www.ogc.org/standards/3DTiles
Open Geospatial Consortium (2019). OGC Moving Features.
https://www.ogc.org/standards/movingfeatures
Open Geospatial Consortium (2020). OGC Standards.
https://www.ogc.org/docs/is
海老原城一,中村彰二朗(2019).Smart City 5.0 地方創生を加速する都市OS,インプレス.
柏の葉IoTビジネス共創ラボ(2019).プロジェクト紹介 高精度マーカによる測位環境の構築.
https://innovation-field-kashiwanoha.jp/project/06/
金 京淑,的野晃整,中村良介(2019).次世代人工知能データプラットフォームの研究開発.
人工知能,Vol. 34, No. 6. pp. 798-803.
国土交通省(2018).スマートシティの実現に向けて【中間とりまとめ】.
国土交通省(2019).【参考】先行モデルプロジェクト概要.
https://www.mlit.go.jp/common/001291681.pdf.
佐々木 洋子,新島 駿(2020).自律移動ロボットによる人と空間情報の構造化.
人工知能,Vol. 35, No. 1, pp. 54-61.
内閣府(2020a).Society 5.0.
https://www8.cao.go.jp/cstp/society5_0/
内閣府(2020b).SIPサイバー/アーキテクチャ構築及び実証研究の成果公表.
https://www8.cao.go.jp/cstp/stmain/20200318siparchitecture.html
内閣府(2020c).スマートシティリファレンスアーキテクチャ ホワイトペーパー.
https://www8.cao.go.jp/cstp/stmain/20200318siparchitecture.html
新島駿,佐々木洋子,的野晃整,金京淑,溝口博(2020).GeoAIデータプラットフォームの歩行者分布を活用した移動ロボットナビゲーション.第25回ロボティクスシンポジア.pp122-129.
三井不動産(2020).柏の葉スマートシティ.
https://www.kashiwanoha-smartcity.com/
著者紹介
小島 功
産業技術総合研究所 情報・人間工学領域 研究戦略部 イノベーションコーディネータ(人工知能研究センター併任).入所以来,データベース,地理空間情報システム,セマンティックWeb等の研究分野に従事.2016年より現職.







